机器人精密齿轮箱

尺寸: RV-25N RV-42N RV-60N RV-80N RV-100N RV-125N RV-160N RV-380N RV-500N RV-700N
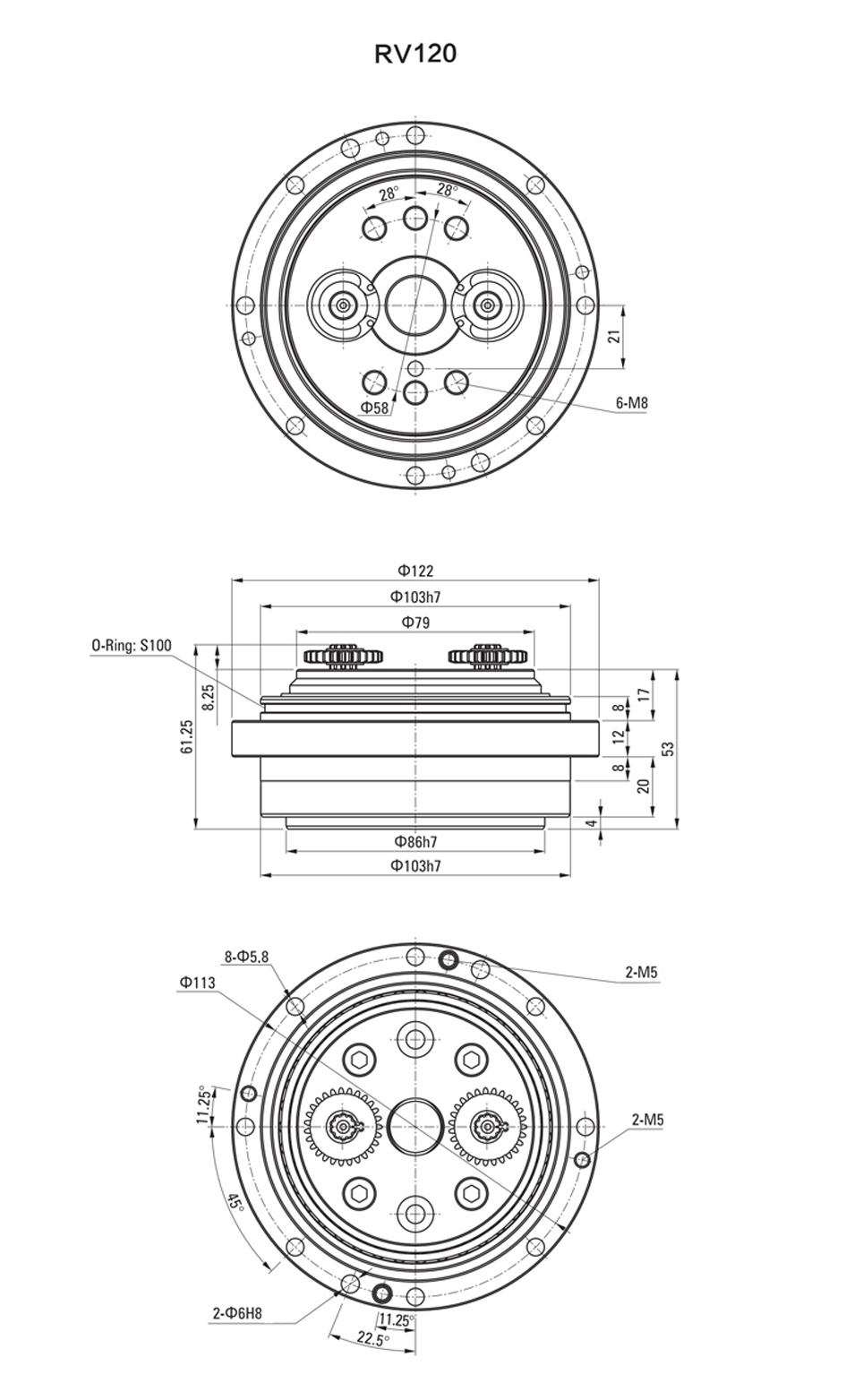
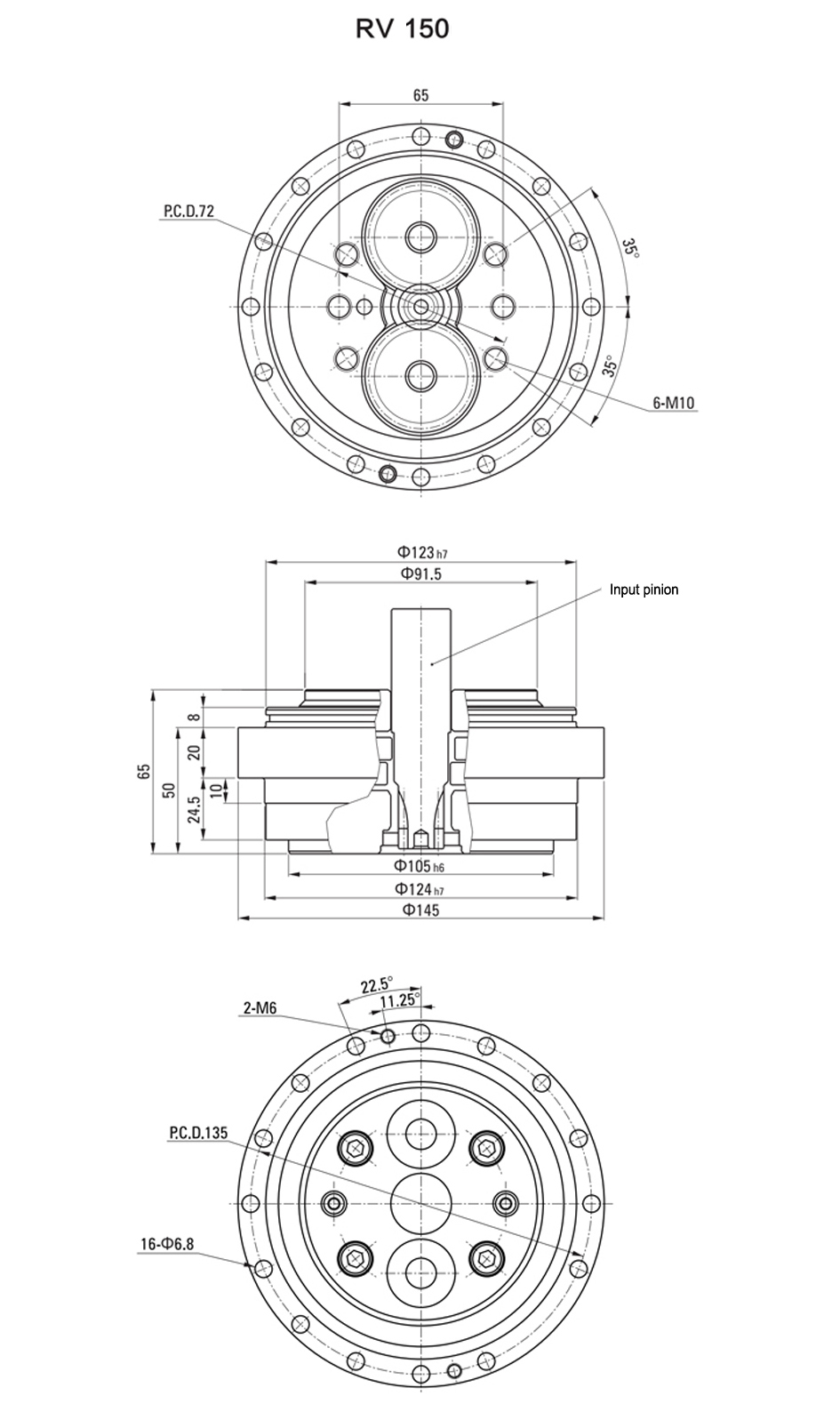
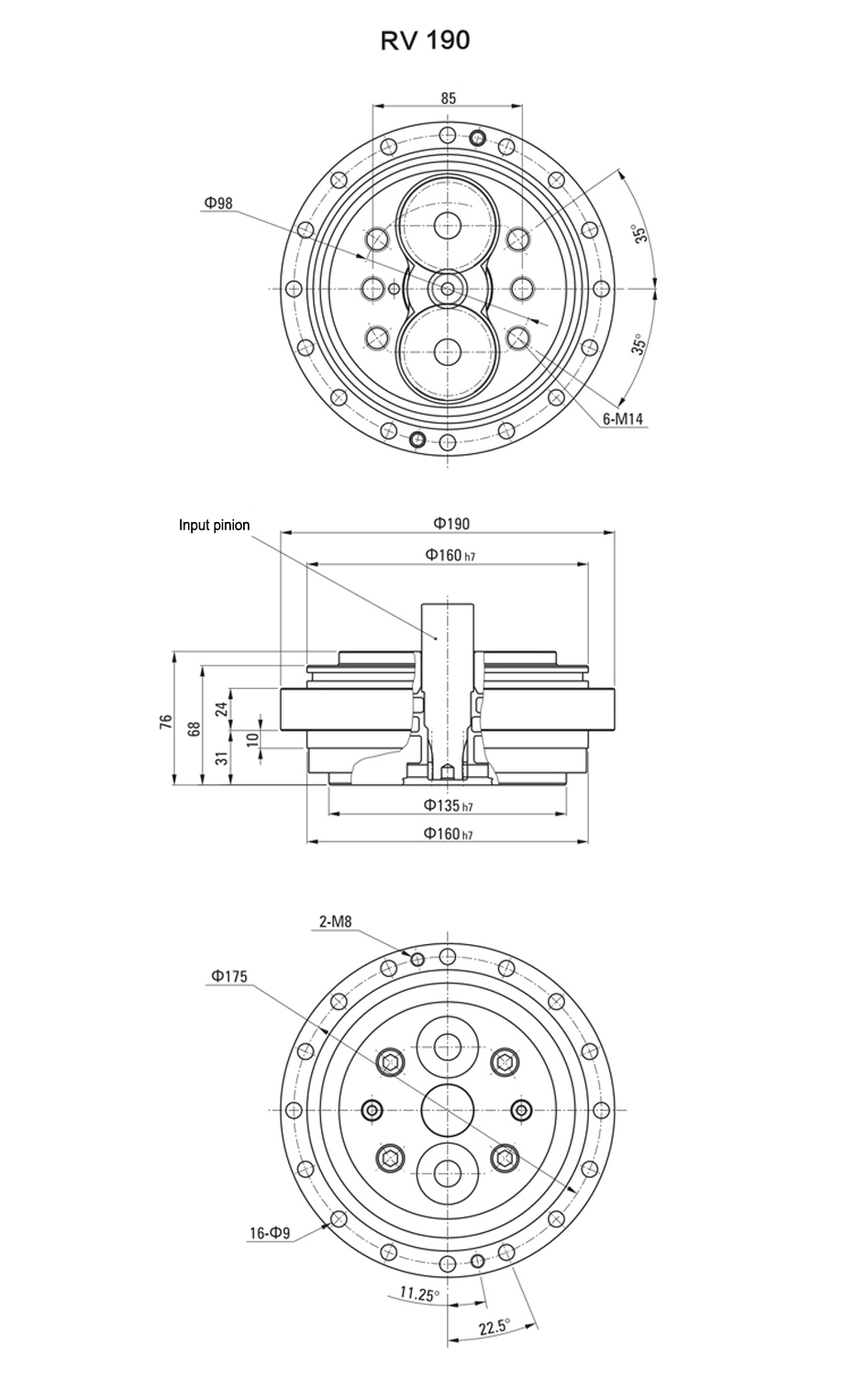
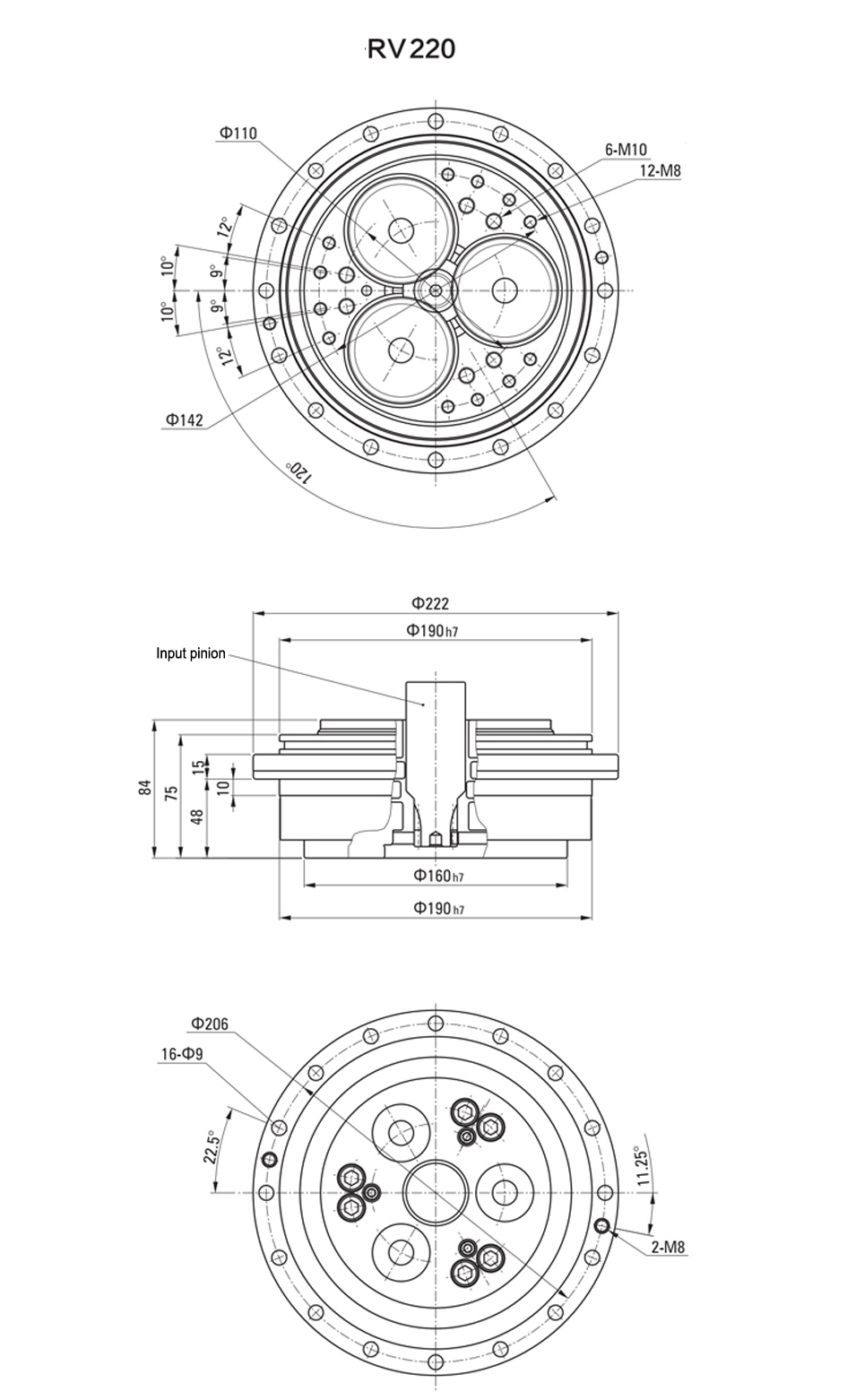
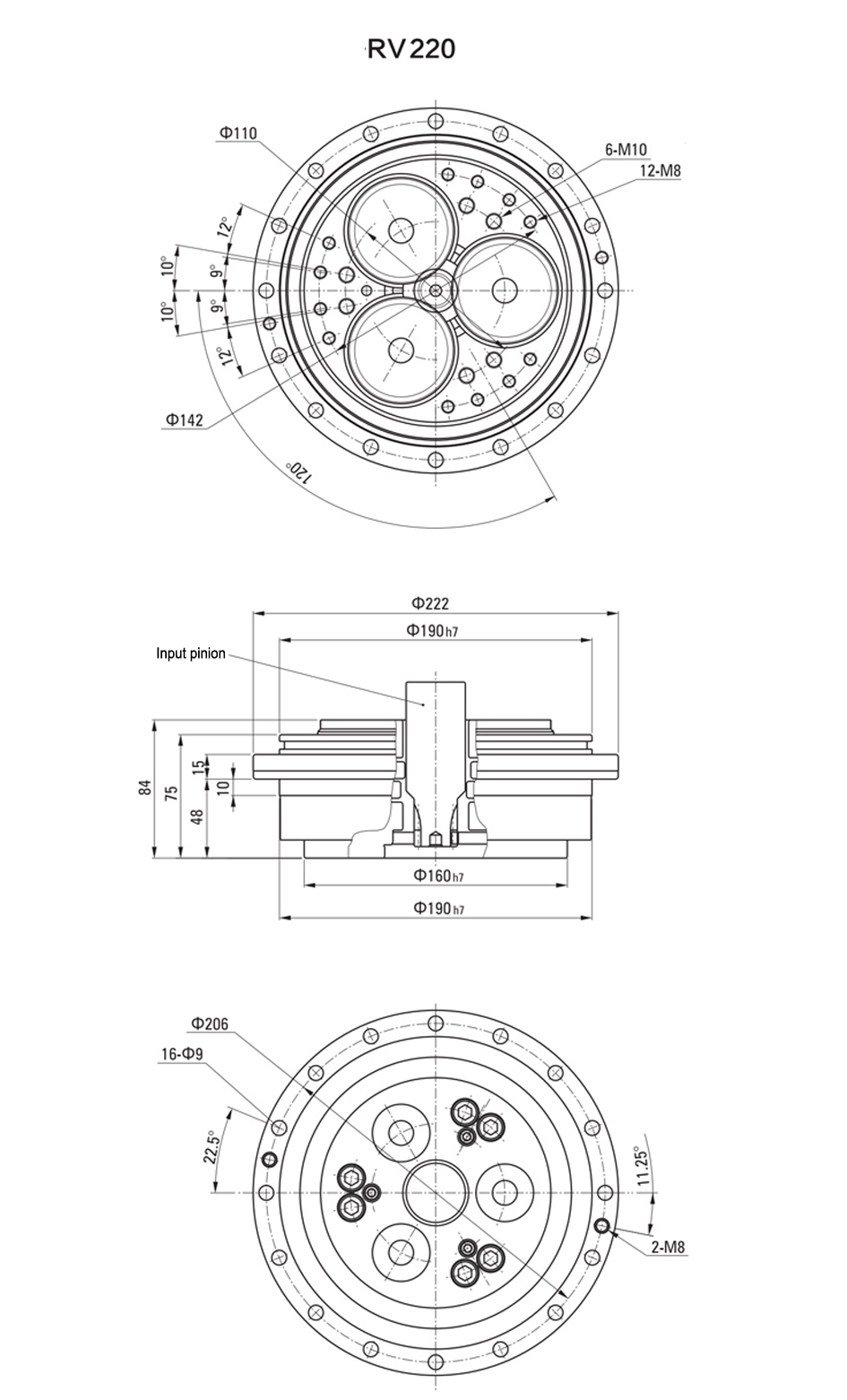
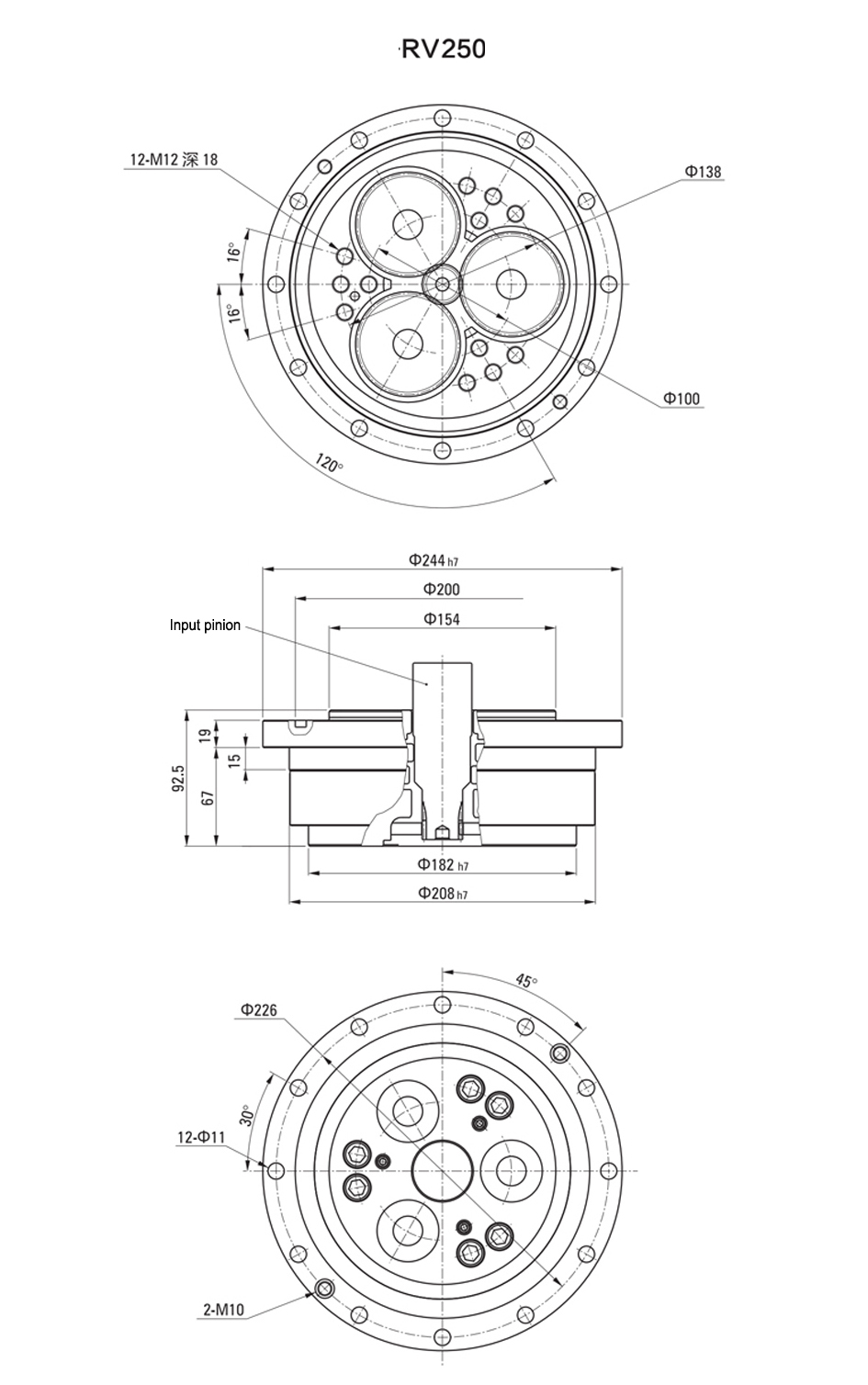
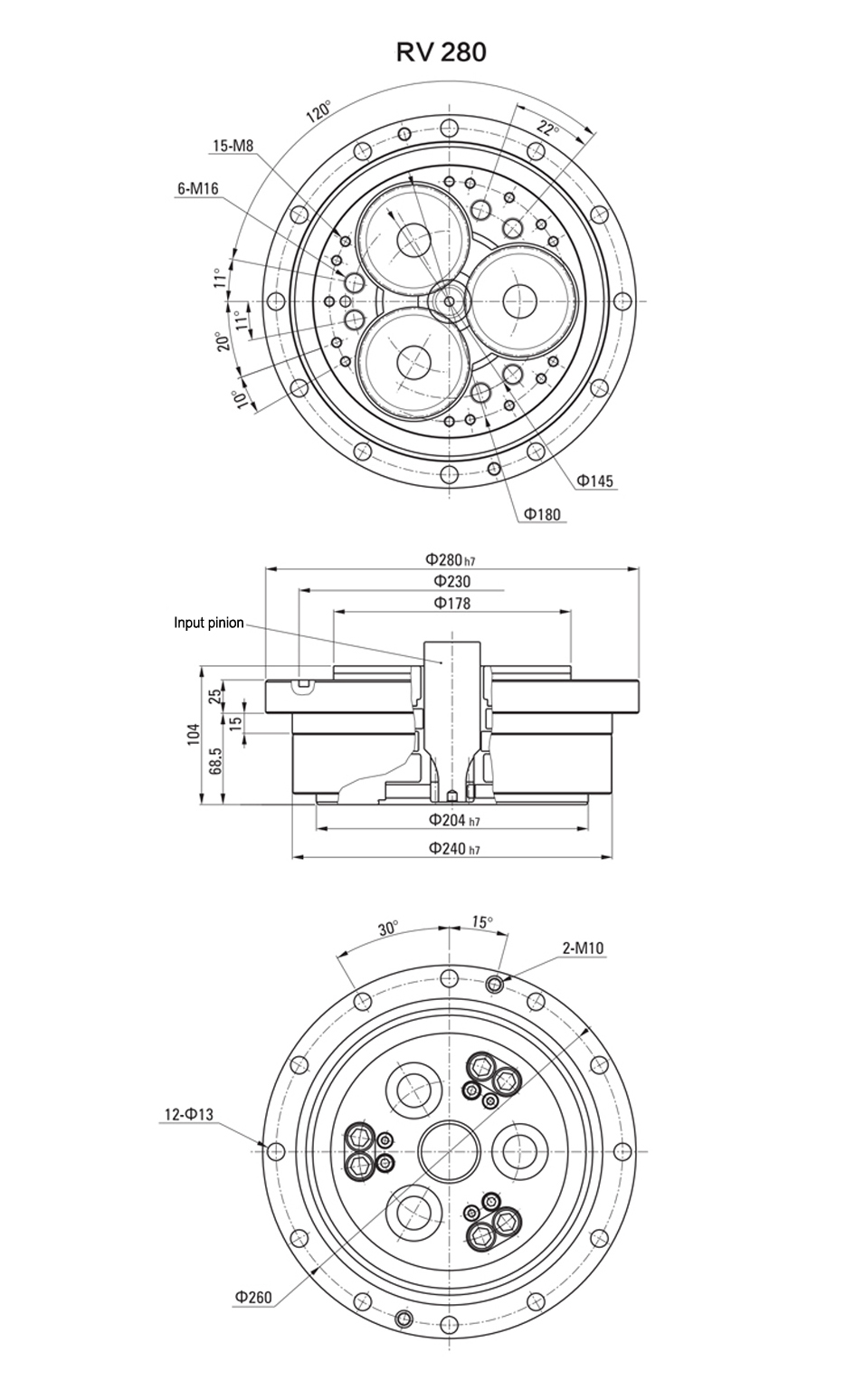
RV120 RV150 RV190 RV220 RV250 RV280
RVE120 RVE150 RVE190 RVE220 RVE250 RVE280
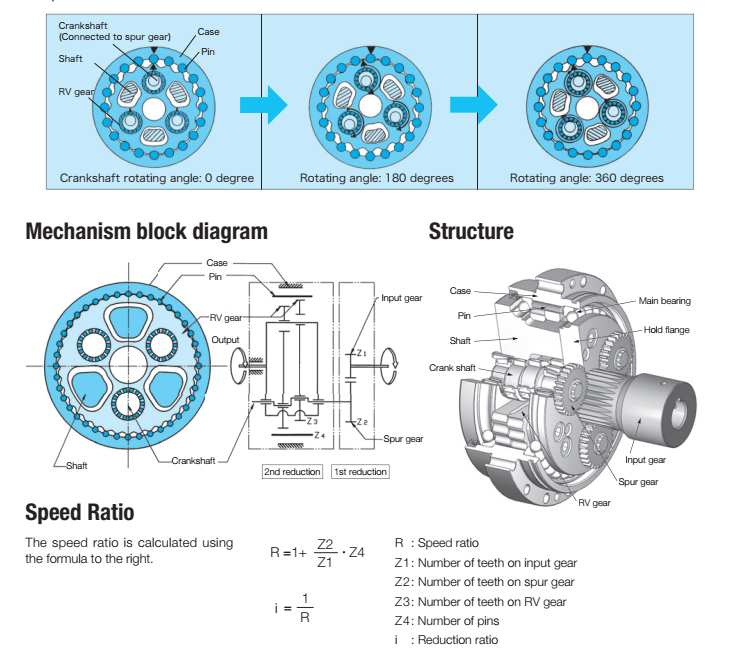
• 第一级正齿轮减速
输入齿轮与联接到曲轴的正齿轮啮合并旋转该正齿轮。通过选择不同的第一级传动比可以提供多种总传动比。
第二级行星齿轮减速
• 由正齿轮驱动的曲轴引起两个称为RV 齿轮的行星齿轮的偏心运动,这两个齿轮彼此偏移180 度以提供平衡负载。
• RV 齿轮的偏心运动导致摆线轮齿与位于壳体内边缘周围的圆柱形销啮合。
• 在曲轴旋转一圈的过程中,RV 齿轮的齿沿旋转曲柄的相反方向移动一个销钉的距离。RV 齿轮的运动使得齿与销保持紧密接触,并且多个齿同时分担载荷。
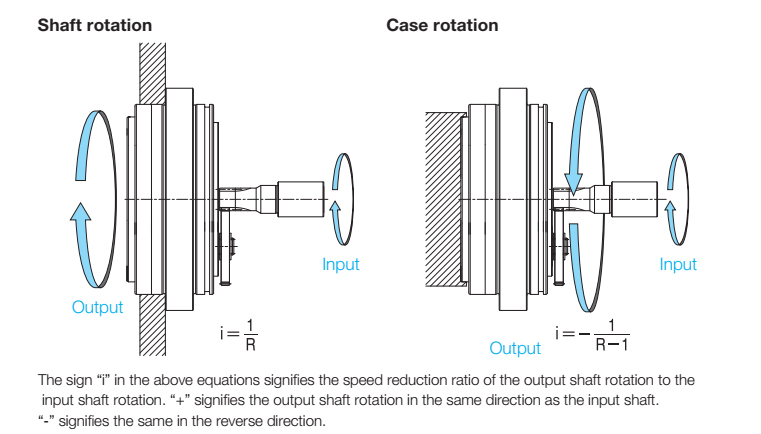
• 输出可以是轴或外壳。如果外壳固定,则轴为输出。如果轴是固定的,则外壳就是输出。
所有齿轮均经渗碳处理,具有高承载、低噪音、低振动、低惯量、长寿命、高精度、回转方向偏差小等特点。所有应用的成本都很低。
旋转方向和传动比
口粮: 41 81 102.17 102.81 107.66 125.21 126 137 156 164.07 141 145.61 161 201 171 75 93 117 139 162 185 81 105 123 144 159 192 .75 105 118 142.44 159 183 203.52
产品代码
总速比 i(第一和第二减速级的)在轴旋转和壳体旋转之间会有所不同,并且可以根据速比计算。